外观
OpenCV学习
需要的库和工具
python3 numpy 库
cmake:转换脚本,编译 opencv
VS
namedWindow()创建显示窗口 窗口大小默认为显示的元素大小imshow()显示图片destroyAllWindows()销毁所有窗口resizeWindow()设定大小waitekey(int time)等待;time 毫秒imread()读取图片 返回 matimwrite()保存图片 保存 matcvtColor():颜色空间转换copy()深拷贝
#从摄像头采集数据对象;一直不停的取 显示就是视频的感觉;可以从多种不同的设备采集
var cap = VideoCapture()
ret,frame = cat.read()
# 读取视频的帧;控制构造函数的参数
var cap = VideoCapture(0)
#视频录制
VideoWrite()#视频录制setMouseCallback(winname,callback,para)鼠标回调函数
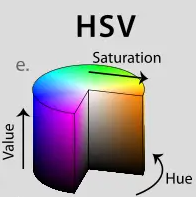
HSV
一个圆柱体模型
- H:色彩值
- S:明亮度
- V:饱和度
使用 numpy 创建矩阵
矩阵二维数组
ROI
Range Of Image:图片中的区域
- roi 的取值为[高度 宽度]
rio=img[10:100,20:200]:x 轴 10 开始取 100 长度,y 轴从 20 开始取 200img[:]:全图
Mat
矩阵,可表示多通道
实例分割算法
目标识别算法
分类算法
语义分割算法
滤波
低通滤波
一般用于去噪点,平滑性
import cv2
import numpy as np
# 卷积 平滑处理
cv2.namedWindow("img",cv2.WINDOW_NORMAL)
cv2.resizeWindow("img", 800, 600)
img = cv2.imread('img/bopian.jpg')
# 均值滤波
kernal = np.ones((5,5),np.float32)/25
dst = cv2.filter2D(img,-1,kernel=kernal)
cv2.imshow('img',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()均值滤波
blur()
中值滤波
medianBlur(),对于类似胡椒噪音的图,可以做到滤波去噪
双边滤波
在保留边缘的同时,进行平滑处理;美颜效果
高通滤波
一般用于边缘检测
Sobel(索贝尔)
求边缘,但是一次只能一个 检查每个小点(像素)周围的亮度。如果某个地方亮度变化很大,比如从很亮一下子变成很暗,这里可能是个边缘!” 这样,它就能把图片里重要的轮廓标记出来。
# Sobel 索贝尔
sobelx= cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3) #x轴的边缘
sobely = cv2.Sobel(img,cv2.CV_64F,0,1)#y轴边缘
dst = cv2.add(sobelx,sobely) #相加Scharr(沙尔)
功能被 sobel 覆盖了,一般不用
Laplacian(拉普拉斯)
相比 sobel 可以同时计算 xy 轴的边缘,一般需要先建造在用
Canny
集合前面几种算法
距离变换
distanceTransform():分离粘连
分水岭
connectedcomponents:区域联通 watershed():分水岭
形态学
- 基于图像形态进行处理的基本方法
- 基本是对二进制图像进行处理
- 卷积核决定图像处理后的效果
二值化
- 将图像的每个像素转化成两种值
- 全局二值化
threshold(img,thresh,maxval,type) - 局部二值化
img = cv2.imread('img/bopian.jpg')
#灰度
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 二值化
eerr,b = cv2.threshold(gray,90,255,cv2.THRESH_BINARY_INV)
print(b.shape)
# 自适应阈值二值化
dst = cv2.adaptiveThreshold(gray,233,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY_INV,3,0)腐蚀膨胀
- 腐蚀
import cv2
import numpy as np
# 腐蚀
cv2.namedWindow("img",cv2.WINDOW_NORMAL)
cv2.resizeWindow("img", 800, 600)
cv2.namedWindow("img1",cv2.WINDOW_NORMAL)
cv2.resizeWindow("img1", 800, 600)
img = cv2.imread('img/bopian.jpg')
kernel = np.ones((5,5),np.uint8)
erode = cv2.erode(img,kernel,iterations=2) # 卷积核可设置1,3,5,7;iterations 腐蚀次数
# 获取卷积核
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(7,7)) # 卷积核形状;大小
erode = cv2.erode(img,kernel,iterations=2) # 卷积核可设置1,3,5,7;iterations 腐蚀次数
cv2.imshow("img",img)
cv2.imshow("img1",erode)
cv2.waitKey(0)
cv2.destroyAllWindows()- 膨胀
import cv2
import numpy as np
# 膨胀 腐蚀可逆,但是卷积核不能太大 否则损失元素过多时 无法还原
cv2.namedWindow("img",cv2.WINDOW_NORMAL)
cv2.resizeWindow("img", 800, 600)
cv2.namedWindow("img1",cv2.WINDOW_NORMAL)
cv2.resizeWindow("img1", 800, 600)
img = cv2.imread('img/bopian.jpg')
kernel = np.ones((7,7),np.uint8
erode = cv2.dilate(img,kernel,iterations=2) # 卷积核可设置1,3,5,7;iterations 腐蚀次数
cv2.imshow("img",img)
cv2.imshow("img1",erode)
cv2.waitKey(0)
cv2.destroyAllWindows()开运算
先腐蚀再膨胀 可以去掉一些噪点,通过卷积核把一些独立的点 腐蚀掉变成边上的颜色,再膨胀回去 噪点就没了
MORPH_OPEN
闭运算
先膨胀再腐蚀
MORPH_CLOSE
import cv2
import numpy as np
# 开闭运算
cv2.namedWindow("img",cv2.WINDOW_NORMAL)
cv2.resizeWindow("img", 800, 600)
cv2.namedWindow("open",cv2.WINDOW_NORMAL)
cv2.resizeWindow("open", 800, 600)
cv2.namedWindow("close",cv2.WINDOW_NORMAL)
cv2.resizeWindow("close", 800, 600)
img = cv2.imread('img/bopian.jpg')
#核的大小决定降噪点的大小
kernel = np.ones((5,5),np.uint8)
# 开运算 对元素外进行降噪
open = cv2.morphologyEx(img,cv2.MORPH_OPEN,kernel)
# 闭运算 对元素内进行降噪
#colse = cv2.morphologyEx(img,cv2.MORPH_CLOSE,kernel)
# 把开运算的结果再进行一次闭运算就可以对内外的进行降噪
colse = cv2.morphologyEx(open,cv2.MORPH_CLOSE,kernel)
cv2.imshow("img",img)
cv2.imshow("open",open)
cv2.imshow("close",colse)
cv2.waitKey(0)
cv2.destroyAllWindows()形态学梯度(边缘)
原图-腐蚀图=梯度;就是边缘
MORPH_GRADIENT `# 梯度 原图-梯度 就是获取边缘
GRADIENT = cv2.morphologyEx(img,cv2.MORPH_GRADIENT,kernel)`
顶帽
原图-开运算=噪点; 开运算 用于去掉元素外的小元素;一般用于去掉大的图,留下小的元素 大块外的小东西
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(77,77)) # 卷积核形状;大小
# 顶帽运算 原图-开运算 保留图中的小元素
GRADIENT = cv2.morphologyEx(img,cv2.MORPH_TOPHAT,kernel)MORPH_TOPHAT
黑帽
原图-闭运算=元素内的噪点;类似顶帽 保留的是元素内的 大块中的小东西
MORPH_BLACKHAT
#黑帽 原图-闭运算
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3,3))
BLACKHAT = cv2.morphologyEx(img,cv2.MORPH_BLACKHAT,kernel)图像轮廓
具有相同颜色或强度的连续点的曲线 具有相同颜色说明彩色的也可以;相同强度的说明是针对二值化的图
- 用于图像分析
- 一般需要先对图像进行二值化或者 Canny
寻找轮廓
(轮廓,..) = findContours(erzhiimg,Mode,ApproximationMode)
- Mode
- RETR_EXTERNAL=0 只检测外轮廓
- RETR_LIST=1 检测的轮廓不建立等级关系
- RETR_CCOMP=2 每层最多两级
- RETR_TREE=3 按照树形存储
- ApproximationMode
- CHAIN_APPROX_NONE 保存所有轮廓的点
- .._SIMPLE 保存角点
绘制轮廓(描点)
drawContours(img,contours,contourIdx,color,thickness ...)
- contourIdx -1 绘制所有轮廓
- color 颜色(0,0,255)
- thickness 线宽 -1 填充
多边形逼近
approxPolyDP()
凸包
存放的轮廓
convexHull()
外接矩阵
判断是否旋转
RotatedRect=minAreaRect(point) #最小外接矩阵
(x,y,w,h) = boundingRect(array) #最大外接矩阵匹配
特征匹配
暴力匹配
FLANN 匹配
适用于多张图的快速特征匹配
单元性矩阵
图像查找
findHomorgraphy(srcPts,sst)
图像替换
图像拼接
- 读取文件并重置尺寸
- 根据特征点核计算描述子,得到单元矩阵
- 图像变换
- 图形拼接输出
ider
- 霍夫变换 检测直线
OpenCV API
图形绘制
line() 绘制直线
#输入图像;起点坐标;终点坐标;线颜色;线宽 如果是- 1则在图案内生成闭合图案并填充颜色。这个参数的默认厚度为1。 - lineType:用于设置线条的类型,有8型连接,抗锯齿等。默认情况是8型连接。cv2.LINE_AA为抗锯齿,这样看起来会非常平滑。
cv2.line(img,(begin_x,begin_y),(end_x,end_y),(255,0,0),5)rectangle() 绘制矩形
cv2.rectangle(img,(起点坐标),(结束坐标),(0,255,0),3)circle() 绘制圆形
cv2.circle(img,(447,63), 63, (0,0,255), -1)ellipse() 绘制椭圆
cv2.ellipse(img,(256,256),(100,50),0,0,180,255,-1)polylines() 绘制多边形
# 第三个参数为False,则绘制所有点的相连图形而不是闭合图形
pts = np.array([[10,5],[20,30],[70,20],[50,10]], np.int32)
pts = pts.reshape((-1,1,2))
cv.polylines(img,[pts],True,(0,255,255))putText() 绘制文字
font = cv.FONT_HERSHEY_SIMPLEX
cv2.putText(img,'OpenCV',(10,500), font, 4,(255,255,255),2,cv.LINE_AA)cvtColor() 图像颜色空间转换
将图像从一个颜色空间转换为另一个颜色空间,例如将彩色图像转换为灰度图像或将图像从 BGR 颜色空间转换为 HSV 颜色空间。
output_image = cv2.cvtColor(input_image, code, dstCn)
'''
参数:
- input_image:输入的图像,可以是一个 NumPy 数组。
- code:颜色空间转换代码,指定转换的类型。可以使用预定义的常量,例如 cv2.COLOR_BGR2GRAY 表示从 BGR 转换为灰度,也可以使用数值表示,例如 0 表示从 BGR 转换为灰度。
- cv2.COLOR_BGR2GRAY:将 BGR 彩色图像转换为灰度图像。
- cv2.COLOR_BGR2RGB:将 BGR 彩色图像转换为 RGB 彩色图像。
- cv2.COLOR_BGR2HSV:将 BGR 彩色图像转换为 HSV 颜色空间。
- cv2.COLOR_BGR2LAB:将 BGR 彩色图像转换为 LAB 颜色空间。
- cv2.COLOR_RGB2GRAY:将 RGB 彩色图像转换为灰度图像。
- cv2.COLOR_RGB2BGR:将 RGB 彩色图像转换为 BGR 彩色图像。
- cv2.COLOR_HSV2BGR:将 HSV 颜色空间图像转换为 BGR 彩色图像。
- cv2.COLOR_LAB2BGR:将 LAB 颜色空间图像转换为 BGR 彩色图像。
- dstCn:可选参数,指定输出图像的通道数。默认值为 `0`,表示与输入图像的通道数相同。
返回值
- output_image`:转换后的输出图像。
'''erode() 腐蚀
减小图像中的白色(前景)区域,同时增强黑色(背景)区域的尺寸。它可以用于去除图像中的噪声、分离相连的物体等
dst = cv2.erode(src, kernel, anchor, iterations, borderType, borderValue)
fs = cv2.erode(roi,kernel= np.ones((3,3),np.uint8),iterations=2)
'''
参数:
src:输入图像,可以是单通道灰度图像或多通道彩色图像。
kernel:用于腐蚀操作的结构元素(或内核),可以通过cv2.getStructuringElement()函数创建或自定义。
anchor:结构元素的锚点位置,默认值为 `(-1, -1)`,表示结构元素的中心点。
iterations:腐蚀操作的迭代次数,默认值为 `1`。
borderType:边界扩充的类型,默认值为 cv2.BORDER_CONSTANT。
borderValue:边界扩充的像素值,当 borderType` 为 `cv2.BORDER_CONSTANT` 时使用,默认值为 `0`。
返回值:
dst:处理后的图像
'''dilate() 膨胀
增强图像中的前景(白)的区域,减少背景(黑)的尺寸。用于填充图像中的空洞、断开的连接边缘、膨胀物体
dst = cv2.dilate(src, kernel, anchor, iterations, borderType, borderValue)
pz = cv2.dilate(roi,kernel= np.ones((3,3),np.uint8),iterations=2)
'''
参数:
src:输入图像,可以是单通道灰度图像或多通道彩色图像。
kernel:用于膨胀操作的结构元素(或内核),可以通过cv2.getStructuringElement()函数创建或自定义。
anchor:结构元素的锚点位置,默认值为 `(-1, -1)`,表示结构元素的中心点。
iterations:膨胀操作的迭代次数,默认值为 `1`。
borderType:边界扩充的类型,默认值为 `cv2.BORDER_CONSTANT`。
borderValue:边界扩充的像素值,当 `borderType` 为 `cv2.BORDER_CONSTANT` 时使用,默认值为 `0`。
返回值:
dst:处理后的图像
'''threshold() 二值化
通过将图像像素的灰度值与预先指定的阈值进行比较,并将像素分为两个类别:低于阈值的像素被设为一个值,高于或等于阈值的像素被设为另一个值。
retval, threshold = cv2.threshold(src, thresh, maxval, type)
'''
参数:
- thresh:阈值,用于将图像进行分割的像素灰度值。
- maxval:当像素值高于或等于阈值时,要设置的像素值。
- type:阈值化操作的类型:
cv2.THRESH_BINARY:对于高于阈值的像素,将其设置为`maxval`,对于低于阈值的像素,将其设置为0。
cv2.THRESH_BINARY_INV:对于高于阈值的像素,将其设置为0,对于低于阈值的像素,将其设置为maxval。
cv2.THRESH_TRUNC: 对于高于阈值的像素,将其设置为阈值,对于低于阈值的像素,保留原始像素值。
cv2.THRESH_TOZERO: 对于高于阈值的像素,保留原始像素值,对于低于阈值的像素,将其设置为0。
cv2.THRESH_TOZERO_INV: 对于高于阈值的像素,将其设置为0,对于低于阈值的像素,保留原始像素值。
返回值,元组:
retval:计算得到的阈值。
threshold:阈值化后的图像。
'''findContours() 轮廓检测
contours, hierarchy = cv2.findContours(image, mode, method, offset)
'''
参数:
- image:二值化图像,通常为灰度图像或经过阈值处理后的图像。
- mode:轮廓检索模式,指定轮廓的层次结构。可以是以下值之一:
- cv2.RETR_EXTERNAL:仅检测外部轮廓。
- cv2.RETR_LIST:检测所有轮廓,并将它们存储在列表中,无层次结构。
- cv2.RETR_CCOMP:检测所有轮廓,并将它们组织为两层层次结构。顶层为外部轮廓,次层为内部轮廓。
- `cv2.RETR_TREE`:检测所有轮廓,并将它们组织为完整的层次结构树。
- method:轮廓逼近方法,指定如何逼近轮廓的方法。可以是以下值之一:
- cv2.CHAIN_APPROX_NONE:保存所有的轮廓点。
- cv2.CHAIN_APPROX_SIMPLE:仅保存轮廓的端点。例如,一个矩形只需四个端点来表示。
- cv2.CHAIN_APPROX_TC89_L1:使用 Teh-Chin 链逼近算法的一种方法。
- cv2.CHAIN_APPROX_TC89_KCOS:使用 Teh-Chin 链逼近算法的另一种方法。
- offset:可选参数,表示轮廓点坐标的偏移量。
返回值:
- contours: 轮廓含点坐标的NumPy数组
- ierarchy: 层次结构
'''contourArea() 获取轮廓面积
对于闭合的轮廓,可以直接计算面积。但对于非闭合的轮廓,需要使用其他方法进行面积计算,例如将轮廓闭合或使用 Green's 定理(也称为面积积分定理)。
area = cv2.contourArea(contour)
'''
参数:
- contour:输入的轮廓,可以是一个包含点坐标的 NumPy 数组。
- oriented:可选参数,表示轮廓是否有方向。如果为 `True`,则计算有方向的轮廓面积;如果为 `False`,则计算无方向(绝对值)的轮廓面积。默认值为 `False`。
返回值:
- area:轮廓的面积。
'''boundingRect() 计算轮廓边界矩形
计算轮廓边界矩形。输出能包含轮廓最小面积的矩形
x, y, width, height = cv2.boundingRect(contour)
'''
参数:
- contour:输入的轮廓,可以是一个包含点坐标的 NumPy 数组。
返回值:
- x:边界矩形的左上角 x 坐标。
- y:边界矩形的左上角 y 坐标。
- width:边界矩形的宽度。
- height:边界矩形的高度。
'''drawContours() 绘制轮廓
image = cv2.drawContours(image, contours, contourIdx, color, thickness, lineType, hierarchy, maxLevel, offset)
'''
参数:
- image:输入的图像,可以是灰度图像或彩色图像。
- contours:要绘制的轮廓,可以是一个包含多个轮廓的列表。
- contourIdx:要绘制的轮廓索引。如果为负值,则绘制所有的轮廓。
- color:绘制的颜色,可以是一个常数值或一个包含三个通道值的元组。
- thickness:绘制的线条粗细,如果为负值或 cv2.FILLED,则填充轮廓内部。
- lineType:线条类型,指定线条的连接方式,默认为 cv2.LINE_8。
- hierarchy:轮廓的层次结构,如果提供了层次结构,则只绘制指定层次的轮廓。
- maxLevel:要绘制的最大层次,如果为 0,则绘制所有层次的轮廓。
- offset:可选参数,表示轮廓点坐标的偏移量。
返回值:
- image:绘制轮廓后的图像。
'''Canny() 轮廓检测
contours, hierarchy = cv2.findContours(image, mode, method, offset)
'''
基本思想是通过以下几个步骤实现的:
1. 使用高斯滤波器对输入图像进行平滑处理,以减少噪声对边缘检测的影响。
2. 计算图像的梯度,找到图像中的边缘强度和方向。
3. 应用非极大值抑制,将边缘像素细化为单像素线条。
4. 通过滞后阈值处理,根据设定的阈值来确定真正的边缘。
参数:
- image:要进行边缘检测的输入图像,通常为灰度图像(单通道图像)。
- threshold1:第一个阈值(低阈值)。较小的梯度值将被认为不是边缘。
- threshold2:第二个阈值(高阈值)。较大的梯度值将被认为是边缘。
- apertureSize(可选):Sobel 算子的孔径大小。默认值为 3。
- L2gradient(可选):一个布尔值,用于指定计算梯度幅值的方法。如果为 True,则使用更精确的 L2 范数计算梯度幅值。默认值为 False,表示使用 L1 范数计算。
返回值:
'''