外观
OpenCV
需要的库和工具
- python3 numpy库
- VS
函数
安装与配置
- 如何安装 OpenCV:
pip install opencv-python - OpenCV 支持 C++、Python 和 Java。
- 执行
import cv2,print(cv2.__version__)验证 OpenCV 安装成功
图像基础
读取图像:
cv2.imread()显示图像:使用
cv2.imshow(),然后cv2.waitKey(0)暂停。保存图像: 使用
cv2.imwrite()图像的数据结构通常是一个多维
NumPy数组。访问图像的像素值:通过数组索引,如
img[100,100]获取图像的尺寸:使用
img.shape转换图像到灰度:使用
cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)图像是使用颜色空间比如
BGR和HSV表示颜色的图像的 ROI (Region of Interest): 图像中你感兴趣的区域
如何拆分和合并图像通道: 使用
cv2.split()和cv2.merge()图像数据类型有哪些: 常见的有
uint8,float32等如何改变图像的数据类型: 使用
NumPy的astype()方法图像缩放: 使用
cv2.resize()旋转图像: 使用
cv2.getRotationMatrix2D()和cv2.warpAffine()图像平移: 指在图像平面上对图像沿 x、y 轴的正方向或反方向移动
进行图像裁剪: 通过数组切片操作,如
img[y1:y2, x1:x2]图像阈值处理: 将图像像素值分割成不同的区域的方法
应用固定阈值:
cv2.threshold()自适应阈值处理: 根据图像不同区域的亮度自动调整阈值
实现图像的二值化: 也是通过
cv2.threshold(),选择合适的阈值图像平滑处理: 使用滤波器,如高斯滤波
cv2.GaussianBlur()中值滤波:
cv2.medianBlur()对去噪效果很好通过
cv2.Canny()函数边缘检测什么是图像梯度: 图像中像素强度的变化和方向
找到图像的轮廓:
cv2.findContours()绘制图像轮廓:
cv2.drawContours()setMouseCallback(winname,callback,para)鼠标回调函数namedWindow()创建显示窗口 窗口大小默认为显示的元素大小imshow()显示图片destroyAllWindows()销毁所有窗口resizeWindow()设定大小waitekey(int time)等待;time 毫秒imread()读取图片 返回matimwrite()保存图片 保存matzeros_like()拷贝图片cvtColor():颜色空间转换copy()深拷贝
#从摄像头采集数据对象;一直不停的取 显示就是视频的感觉;可以从多种不同的设备采集
var cap = VideoCapture()
ret,frame = cat.read()
# 读取视频的帧;控制构造函数的参数
var cap = VideoCapture(0)
#视频录制
VideoWrite()#视频录制setMouseCallback(winname,callback,para)鼠标回调函数
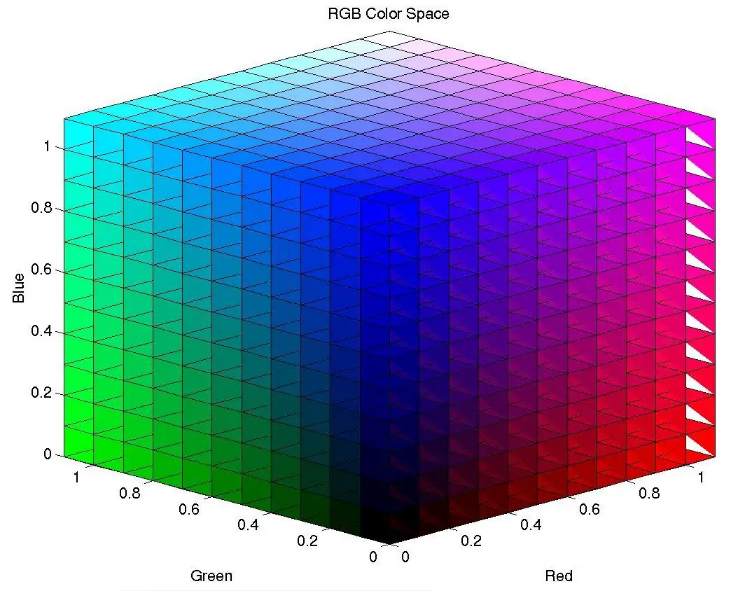
RGB
三原色,红绿蓝;三个颜色通道的变化以及叠加组合出各种颜色。
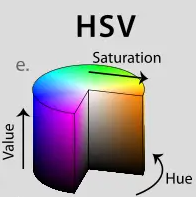
HSV
一个圆柱体模型,直观的表现颜色深浅及明暗
- H:色彩值(0-360°)
- S:明亮度(0.0-1.0)
- V:饱和度(0.0(黑)-1.0(白))
Mat
矩阵,可表示多通道
ROI
Range Of Image:图片中的区域
roi的取值为[高度 宽度]
rio=img[10:100,20:200]:x轴10开始取100长度,y轴从20开始取200img[:]:全图实例分割算法
目标识别算法
分类算法
语义分割算法
分水岭算法
显著性检测算法
滤波
低通滤波
一般用于去噪点,平滑性
import cv2
import numpy as np
# 卷积 平滑处理
cv2.namedWindow("img",cv2.WINDOW_NORMAL)
cv2.resizeWindow("img", 800, 600)
img = cv2.imread('img/bopian.jpg')
# 均值滤波
kernal = np.ones((5,5),np.float32)/25
dst = cv2.filter2D(img,-1,kernel=kernal)
cv2.imshow('img',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()均值滤波 blur()
中值滤波
medianBlur(),对于类似胡椒噪音的图,可以做到滤波去噪双边滤波
在保留边缘的同时,进行平滑处理;美颜效果
高通滤波
一般用于边缘检测
- Sobel(索贝尔)
求边缘,但是一次只能一个
# Sobel 索贝尔
sobelx= cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3) #x轴的边缘
sobely = cv2.Sobel(img,cv2.CV_64F,0,1)#y轴边缘
dst = cv2.add(sobelx,sobely) #相加- Scharr(沙尔)
功能被sobel覆盖了,一般不用
- Laplacian(拉普拉斯)
相比sobel 可以同时计算xy轴的边缘,一般需要先建造在用
- Canny
集合前面几种算法
形态学
基于图像形态进行处理的基本方法
基本是对二进制图像进行处理
卷积核决定图像处理后的效果
二值化
- 将图像的每个像素转化成两种值
- 全局二值化
threshold(img,thresh,maxval,type) - 局部二值化
img = cv2.imread('img/bopian.jpg')
#灰度
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 二值化
eerr,b = cv2.threshold(gray,90,255,cv2.THRESH_BINARY_INV)
print(b.shape)
# 自适应阈值二值化
dst = cv2.adaptiveThreshold(gray,233,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY_INV,3,0)- 腐蚀膨胀
- 腐蚀
import cv2
import numpy as np
# 腐蚀
cv2.namedWindow("img",cv2.WINDOW_NORMAL)
cv2.resizeWindow("img", 800, 600)
cv2.namedWindow("img1",cv2.WINDOW_NORMAL)
cv2.resizeWindow("img1", 800, 600)
img = cv2.imread('img/bopian.jpg')
kernel = np.ones((5,5),np.uint8)
erode = cv2.erode(img,kernel,iterations=2) # 卷积核可设置1,3,5,7;iterations 腐蚀次数
# 获取卷积核
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(7,7)) # 卷积核形状;大小
erode = cv2.erode(img,kernel,iterations=2) # 卷积核可设置1,3,5,7;iterations 腐蚀次数
cv2.imshow("img",img)
cv2.imshow("img1",erode)
cv2.waitKey(0)
cv2.destroyAllWindows()- 膨胀
import cv2
import numpy as np
# 膨胀 腐蚀可逆,但是卷积核不能太大 否则损失元素过多时 无法还原
cv2.namedWindow("img",cv2.WINDOW_NORMAL)
cv2.resizeWindow("img", 800, 600)
cv2.namedWindow("img1",cv2.WINDOW_NORMAL)
cv2.resizeWindow("img1", 800, 600)
img = cv2.imread('img/bopian.jpg')
kernel = np.ones((7,7),np.uint8
erode = cv2.dilate(img,kernel,iterations=2) # 卷积核可设置1,3,5,7;iterations 腐蚀次数
cv2.imshow("img",img)
cv2.imshow("img1",erode)
cv2.waitKey(0)
cv2.destroyAllWindows()- 开运算
先腐蚀再膨胀 可以去掉一些噪点,通过卷积核把一些独立的点 腐蚀掉变成边上的颜色,再膨胀回去 噪点就没了
MORPH_OPEN
- 闭运算
先膨胀再腐蚀
MORPH_CLOSE
import cv2
import numpy as np
# 开闭运算
cv2.namedWindow("img",cv2.WINDOW_NORMAL)
cv2.resizeWindow("img", 800, 600)
cv2.namedWindow("open",cv2.WINDOW_NORMAL)
cv2.resizeWindow("open", 800, 600)
cv2.namedWindow("close",cv2.WINDOW_NORMAL)
cv2.resizeWindow("close", 800, 600)
img = cv2.imread('img/bopian.jpg')
#核的大小决定降噪点的大小
kernel = np.ones((5,5),np.uint8)
# 开运算 对元素外进行降噪
open = cv2.morphologyEx(img,cv2.MORPH_OPEN,kernel)
# 闭运算 对元素内进行降噪
#colse = cv2.morphologyEx(img,cv2.MORPH_CLOSE,kernel)
# 把开运算的结果再进行一次闭运算就可以对内外的进行降噪
colse = cv2.morphologyEx(open,cv2.MORPH_CLOSE,kernel)
cv2.imshow("img",img)
cv2.imshow("open",open)
cv2.imshow("close",colse)
cv2.waitKey(0)
cv2.destroyAllWindows()- 形态学梯度(边缘)
原图-腐蚀图=梯度;就是边缘
MORPH_GRADIENT `# 梯度 原图-梯度 就是获取边缘
GRADIENT = cv2.morphologyEx(img,cv2.MORPH_GRADIENT,kernel)`
- 顶帽
原图-开运算=噪点; 开运算 用于去掉元素外的小元素;一般用于去掉大的图,留下小的元素 大块外的小东西
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(77,77)) # 卷积核形状;大小
# 顶帽运算 原图-开运算 保留图中的小元素
GRADIENT = cv2.morphologyEx(img,cv2.MORPH_TOPHAT,kernel)MORPH_TOPHAT
- 黑帽
原图-闭运算=元素内的噪点;类似顶帽 保留的是元素内的 大块中的小东西
MORPH_BLACKHAT
#黑帽 原图-闭运算
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3,3))
BLACKHAT = cv2.morphologyEx(img,cv2.MORPH_BLACKHAT,kernel)- 图像轮廓
具有相同颜色或强度的连续点的曲线 具有相同颜色说明彩色的也可以;相同强度的说明是针对二值化的图
用于图像分析
一般需要先对图像进行二值化或者Canny
寻找轮廓
(轮廓,..) = findContours(erzhiimg,Mode,ApproximationMode)Mode
- RETR_EXTERNAL=0 只检测外轮廓
- RETR_LIST=1 检测的轮廓不建立等级关系
- RETR_CCOMP=2 每层最多两级
- RETR_TREE=3 按照树形存储
ApproximationMode
- CHAIN_APPROX_NONE 保存所有轮廓的点
- .._SIMPLE 保存角点
绘制轮廓(描点)
drawContours(img,contours,contourIdx,color,thickness ...)contourIdx -1 绘制所有轮廓
color 颜色(0,0,255)
thickness 线宽 -1 填充
多边形逼近
approxPolyDP()凸包
存放的轮廓
convexHull()
- 外接矩阵
判断是否旋转
RotatedRect=minAreaRect(point) #最小外接矩阵
(x,y,w,h) = boundingRect(array) #最大外接矩阵匹配
- 特征匹配
- 暴力匹配
- FLANN匹配
适用于多张图的快速特征匹配
单元性矩阵
- 图像查找
findHomorgraphy(srcPts,sst) - 图像替换
- 图像拼接
- 读取文件并重置尺寸
- 根据特征点核计算描述子,得到单元矩阵
- 图像变换
- 图形拼接输出
ider
- 霍夫变换 检测直线
OpenCV API
public static void ShowImage(this Mat img, string windowsName="asdf")
{
if (img.Empty()) throw new Exception("图片为空,请检查路径");
Cv2.NamedWindow(windowsName, WindowFlags.Normal);
Cv2.ResizeWindow(windowsName, 1000, 600);
Cv2.ImShow(windowsName, img);
//Cv2.WaitKey(0);
//Cv2.DestroyWindow(windowsName);
}图形绘制
line() 绘制直线
#输入图像;起点坐标;终点坐标;线颜色;线宽 如果是- 1则在图案内生成闭合图案并填充颜色。这个参数的默认厚度为1。 - lineType:用于设置线条的类型,有8型连接,抗锯齿等。默认情况是8型连接。cv2.LINE_AA为抗锯齿,这样看起来会非常平滑。
cv2.line(img,(begin_x,begin_y),(end_x,end_y),(255,0,0),5)rectangle() 绘制矩形
cv2.rectangle(img,(起点坐标),(结束坐标),(0,255,0),3)circle() 绘制圆形
cv2.circle(img,(447,63), 63, (0,0,255), -1)ellipse() 绘制椭圆
cv2.ellipse(img,(256,256),(100,50),0,0,180,255,-1)polylines() 绘制多边形
# 第三个参数为False,则绘制所有点的相连图形而不是闭合图形
pts = np.array([[10,5],[20,30],[70,20],[50,10]], np.int32)
pts = pts.reshape((-1,1,2))
cv.polylines(img,[pts],True,(0,255,255))putText() 绘制文字
font = cv.FONT_HERSHEY_SIMPLEX
cv2.putText(img,'OpenCV',(10,500), font, 4,(255,255,255),2,cv.LINE_AA)cvtColor() 图像颜色空间转换
将图像从一个颜色空间转换为另一个颜色空间,例如将彩色图像转换为灰度图像或将图像从 BGR 颜色空间转换为 HSV 颜色空间。
output_image = cv2.cvtColor(input_image, code, dstCn)
'''
参数:
- input_image:输入的图像,可以是一个 NumPy 数组。
- code:颜色空间转换代码,指定转换的类型。可以使用预定义的常量,例如 cv2.COLOR_BGR2GRAY 表示从 BGR 转换为灰度,也可以使用数值表示,例如 0 表示从 BGR 转换为灰度。
- cv2.COLOR_BGR2GRAY:将 BGR 彩色图像转换为灰度图像。
- cv2.COLOR_BGR2RGB:将 BGR 彩色图像转换为 RGB 彩色图像。
- cv2.COLOR_BGR2HSV:将 BGR 彩色图像转换为 HSV 颜色空间。
- cv2.COLOR_BGR2LAB:将 BGR 彩色图像转换为 LAB 颜色空间。
- cv2.COLOR_RGB2GRAY:将 RGB 彩色图像转换为灰度图像。
- cv2.COLOR_RGB2BGR:将 RGB 彩色图像转换为 BGR 彩色图像。
- cv2.COLOR_HSV2BGR:将 HSV 颜色空间图像转换为 BGR 彩色图像。
- cv2.COLOR_LAB2BGR:将 LAB 颜色空间图像转换为 BGR 彩色图像。
- dstCn:可选参数,指定输出图像的通道数。默认值为 `0`,表示与输入图像的通道数相同。
返回值
- output_image`:转换后的输出图像。
'''bitwise_and() 掩模、提取共同
执行按位与操作。它可以用于对图像进行掩模操作,提取两个图像中相应位置的像素的共同部分
dst = cv2.bitwise_and(src1, src2[, dst[, mask]])
'''
参数解释:
- `src1`:第一个输入图像(单通道或多通道图像)。
- `src2`:第二个输入图像(单通道或多通道图像)。
- `dst`(可选):输出图像,与输入图像具有相同的大小和深度。
- `mask`(可选):可选的掩模图像,用于指定执行按位与操作的区域。如果提供了掩模图像,则只有在掩模图像中对应位置为非零值时,才会执行按位与操作。
返回
一个新的图像,它是输入图像 `src1` 和 `src2` 按位与的结果。
'''bitwise_not() 像素反转
执行按位取反操作。它可以用于将图像中的像素值进行反转,将白色变为黑色,黑色变为白色。
dst = cv2.bitwise_not(src)
'''
参数:
- src:输入图像(单通道或多通道图像)。
返回值
- dst(可选):输出图像,与输入图像具有相同的大小和深度。
'''inRange() 指定范围提取像素
用于在一幅图像中提取指定范围内的像素。
dst = cv2.inRange(src, lowerb, upperb[, dst])
'''
参数:
- src:输入图像(单通道或多通道图像)。
- lowerb:指定范围的下界值(包含)。
- upperb:指定范围的上界值(包含)。
返回值
- dst(可选):输出图像,与输入图像具有相同的大小和深度。
'''
# eg: hsv中取范围色素进行二值化
hsv = cv2.cvtColor(img,cv2.COLOR_BGR2HSV)
lower_blue = np.array([20, 0, 0])
upper_blue = np.array([170, 255, 255])
hsv_small = cv2.inRange(_hsv, lower_blue, upper_blue)erode() 腐蚀
减小图像中的白色(前景)区域,同时增强黑色(背景)区域的尺寸。它可以用于去除图像中的噪声、分离相连的物体等
dst = cv2.erode(src, kernel, anchor, iterations, borderType, borderValue)
fs = cv2.erode(roi,kernel= np.ones((3,3),np.uint8),iterations=2)
'''
参数:
src:输入图像,可以是单通道灰度图像或多通道彩色图像。
kernel:用于腐蚀操作的结构元素(或内核),可以通过cv2.getStructuringElement()函数创建或自定义。
anchor:结构元素的锚点位置,默认值为 `(-1, -1)`,表示结构元素的中心点。
iterations:腐蚀操作的迭代次数,默认值为 `1`。
borderType:边界扩充的类型,默认值为 cv2.BORDER_CONSTANT。
borderValue:边界扩充的像素值,当 borderType` 为 `cv2.BORDER_CONSTANT` 时使用,默认值为 `0`。
返回值:
dst:处理后的图像
'''dilate() 膨胀
增强图像中的前景(白)的区域,减少背景(黑)的尺寸。用于填充图像中的空洞、断开的连接边缘、膨胀物体
dst = cv2.dilate(src, kernel, anchor, iterations, borderType, borderValue)
pz = cv2.dilate(roi,kernel= np.ones((3,3),np.uint8),iterations=2)
'''
参数:
src:输入图像,可以是单通道灰度图像或多通道彩色图像。
kernel:用于膨胀操作的结构元素(或内核),可以通过cv2.getStructuringElement()函数创建或自定义。
anchor:结构元素的锚点位置,默认值为 `(-1, -1)`,表示结构元素的中心点。
iterations:膨胀操作的迭代次数,默认值为 `1`。
borderType:边界扩充的类型,默认值为 `cv2.BORDER_CONSTANT`。
borderValue:边界扩充的像素值,当 `borderType` 为 `cv2.BORDER_CONSTANT` 时使用,默认值为 `0`。
返回值:
dst:处理后的图像
'''threshold() 二值化
通过将图像像素的灰度值与预先指定的阈值进行比较,并将像素分为两个类别:低于阈值的像素被设为一个值,高于或等于阈值的像素被设为另一个值。
retval, threshold = cv2.threshold(src, thresh, maxval, type)
'''
参数:
- thresh:阈值,用于将图像进行分割的像素灰度值。
- maxval:当像素值高于或等于阈值时,要设置的像素值。
- type:阈值化操作的类型:
cv2.THRESH_BINARY:对于高于阈值的像素,将其设置为`maxval`,对于低于阈值的像素,将其设置为0。
cv2.THRESH_BINARY_INV:对于高于阈值的像素,将其设置为0,对于低于阈值的像素,将其设置为maxval。
cv2.THRESH_TRUNC: 对于高于阈值的像素,将其设置为阈值,对于低于阈值的像素,保留原始像素值。
cv2.THRESH_TOZERO: 对于高于阈值的像素,保留原始像素值,对于低于阈值的像素,将其设置为0。
cv2.THRESH_TOZERO_INV: 对于高于阈值的像素,将其设置为0,对于低于阈值的像素,保留原始像素值。
返回值,元组:
retval:计算得到的阈值。
threshold:阈值化后的图像。
'''adaptiveThreshold() 自适应二值化
用于自适应阈值处理。自适应阈值处理是一种根据图像局部区域的灰度特征自动确定阈值的方法,适用于图像中存在不均匀光照或背景的情况。
dst = cv2.adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C)
'''
参数解释:
- src:输入图像,应为灰度图像。
- maxValue:阈值的最大值。
- adaptiveMethod:自适应阈值计算方法。可选择以下两种方法之一:
- cv2.ADAPTIVE_THRESH_MEAN_C:根据邻域块的平均值计算阈值。
- cv2.ADAPTIVE_THRESH_GAUSSIAN_C:根据邻域块的加权平均值(按照高斯权重)计算阈值。
- thresholdType:阈值类型。可选择以下一个阈值类型:
- cv2.THRESH_BINARY:二值阈值化,大于阈值的像素设置为 `maxValue`,小于等于阈值的像素设置为0。
- cv2.THRESH_BINARY_INV:反二值阈值化,大于阈值的像素设置为0,小于等于阈值的像素设置为 `maxValue`。
- blockSize:邻域块的大小,用于计算每个像素的阈值。应为奇数。
- C:从计算的阈值中减去的常数。它用于进一步微调阈值。findContours() 轮廓检测
contours, hierarchy = cv2.findContours(image, mode, method, offset)
'''
参数:
- image:二值化图像,通常为灰度图像或经过阈值处理后的图像。
- mode:轮廓检索模式,指定轮廓的层次结构。可以是以下值之一:
- cv2.RETR_EXTERNAL:仅检测外部轮廓。
- cv2.RETR_LIST:检测所有轮廓,并将它们存储在列表中,无层次结构。
- cv2.RETR_CCOMP:检测所有轮廓,并将它们组织为两层层次结构。顶层为外部轮廓,次层为内部轮廓。
- `cv2.RETR_TREE`:检测所有轮廓,并将它们组织为完整的层次结构树。
- method:轮廓逼近方法,指定如何逼近轮廓的方法。可以是以下值之一:
- cv2.CHAIN_APPROX_NONE:保存所有的轮廓点。
- cv2.CHAIN_APPROX_SIMPLE:仅保存轮廓的端点。例如,一个矩形只需四个端点来表示。
- cv2.CHAIN_APPROX_TC89_L1:使用 Teh-Chin 链逼近算法的一种方法。
- cv2.CHAIN_APPROX_TC89_KCOS:使用 Teh-Chin 链逼近算法的另一种方法。
- offset:可选参数,表示轮廓点坐标的偏移量。
返回值:
- contours: 轮廓含点坐标的NumPy数组
- ierarchy: 层次结构
'''contourArea() 获取轮廓面积
对于闭合的轮廓,可以直接计算面积。但对于非闭合的轮廓,需要使用其他方法进行面积计算,例如将轮廓闭合或使用 Green's 定理(也称为面积积分定理)。
area = cv2.contourArea(contour)
'''
参数:
- contour:输入的轮廓,可以是一个包含点坐标的 NumPy 数组。
- oriented:可选参数,表示轮廓是否有方向。如果为 `True`,则计算有方向的轮廓面积;如果为 `False`,则计算无方向(绝对值)的轮廓面积。默认值为 `False`。
返回值:
- area:轮廓的面积。
'''boundingRect() 矩形拟合 计算轮廓边界矩形
计算轮廓边界矩形。输出能包含轮廓最小面积的矩形
x, y, width, height = cv2.boundingRect(contour)
'''
参数:
- contour:输入的轮廓,可以是一个包含点坐标的 NumPy 数组。
返回值:
- x:边界矩形的左上角 x 坐标。
- y:边界矩形的左上角 y 坐标。
- width:边界矩形的宽度。
- height:边界矩形的高度。
'''minEnclosingCircle() 圆形拟合
计算轮廓边界的圆形
center, radius = cv2.minEnclosingCircle(contour)bonvexHull() 多边形凸包拟合
hull = convexHull(points, clockwise=None, returnPoints=None)
'''
- points 是轮廓数组
- clockwise 是布尔类型的参数,默认为True,表示凸包中的点按顺时针排序,为False时则按逆时针 排序。
- returnPoints 是布尔类型的参数,默认为True时返回点坐标。如果为False则返回点索引。
'''drawContours() 绘制轮廓
image = cv2.drawContours(image, contours, contourIdx, color, thickness, lineType, hierarchy, maxLevel, offset)
'''
参数:
- image:输入的图像,可以是灰度图像或彩色图像。
- contours:要绘制的轮廓,可以是一个包含多个轮廓的列表。
- contourIdx:要绘制的轮廓索引。如果为负值,则绘制所有的轮廓。
- color:绘制的颜色,可以是一个常数值或一个包含三个通道值的元组。
- thickness:绘制的线条粗细,如果为负值或 cv2.FILLED,则填充轮廓内部。
- lineType:线条类型,指定线条的连接方式,默认为 cv2.LINE_8。
- hierarchy:轮廓的层次结构,如果提供了层次结构,则只绘制指定层次的轮廓。
- maxLevel:要绘制的最大层次,如果为 0,则绘制所有层次的轮廓。
- offset:可选参数,表示轮廓点坐标的偏移量。
返回值:
- image:绘制轮廓后的图像。
'''Canny() 轮廓检测
contours, hierarchy = cv2.findContours(image, mode, method, offset)
'''
基本思想是通过以下几个步骤实现的:
1. 使用高斯滤波器对输入图像进行平滑处理,以减少噪声对边缘检测的影响。
2. 计算图像的梯度,找到图像中的边缘强度和方向。
3. 应用非极大值抑制,将边缘像素细化为单像素线条。
4. 通过滞后阈值处理,根据设定的阈值来确定真正的边缘。
参数:
- image:要进行边缘检测的输入图像,通常为灰度图像(单通道图像)。
- threshold1:第一个阈值(低阈值)。较小的梯度值将被认为不是边缘。
- threshold2:第二个阈值(高阈值)。较大的梯度值将被认为是边缘。
- apertureSize(可选):Sobel 算子的孔径大小。默认值为 3。
- L2gradient(可选):一个布尔值,用于指定计算梯度幅值的方法。如果为 True,则使用更精确的 L2 范数计算梯度幅值。默认值为 False,表示使用 L1 范数计算。
返回值:
'''goodFeaturesToTrack() 角点检测
corners = cv2.goodFeaturesToTrack(image, maxCorners, qualityLevel, minDistance, mask=None, blockSize=None, useHarrisDetector=False, k=0.04)
'''
参数解释:
- image:输入图像,应为灰度图像。
- maxCorners:期望检测到的最大角点数量。
- qualityLevel:角点的质量水平阈值,范围在 0 到 1 之间。只有满足质量水平要求的角点才会被保留。
- minDistance:检测到的角点之间的最小距离。如果两个角点之间的距离小于此值,则其中一个角点会被抑制。
- mask(可选):可选的掩膜图像,用于指定感兴趣区域。如果提供了掩膜,只有掩膜内的区域会进行角点检测。
- blockSize(可选):用于计算角点响应函数的邻域块大小。如果未指定,OpenCV会使用默认值 3。
- useHarrisDetector(可选):布尔值,指定是否使用Harris角点检测算法。默认为False,表示使用Shi-Tomasi算法。
- k(可选):Harris角点检测算法中的自由参数k。如果`useHarrisDetector`为True,则需要指定此参数的值。
函数返回一个Numpy数组`corners`,其中包含检测到的角点的坐标。
'''distanceTransform() 距离变换
计算图像中每个像素与其最近像素的距离,一般用来找半径,图像分割、形态学操作、骨架提取等的
dst = cv2.distanceTransform(src, distanceType, maskSize, dstType)
'''
参数说明:
- src:输入图像,必须是单通道、浮点型(`float32`)的图像。
- distanceType:距离类型,指定距离计算的方式,可以是以下几种类型之一:
- `cv2.DIST_L1:L1 距离(曼哈顿距离)。
- `cv2.DIST_L2:L2 距离(欧几里得距离)。
- `cv2.DIST_C:C 距离(Chebyshev 距离)。
- maskSize:掩码大小,指定距离计算时使用的掩码尺寸。可以是以下几种大小之一:
- 1:3x3 掩码。
- 2:5x5 掩码。
- 3:Precise 距离掩码。
- dstType:输出图像的数据类型,可以是 `cv2.CV_32F`(默认)或 `cv2.CV_16U`。
返回值:
- dst:距离变换后的图像,与输入图像具有相同的尺寸和数据类型。
'''HoughLines() 直线检测
效果